介绍基于PLC的摊铺机行走控制系统纠偏算法研究。
随着我国公路建设事业的高速发展,工程建设对施工设备的质量有了更高的要求。由于摊铺机是边走边作业的施工机械,其行驶速度稳定性和行驶的直线性对摊铺路面的平整度、初始密实度、离析程度有着很大的影响,因此行走控制系统的性能是影响摊铺机作业性能的重要因素,在很大程度上决定着摊铺质量的好坏。
目前摊铺机行走系统控制方法主要采用PID控制。PID控制由于算法简单,鲁棒性好,可靠性高,在控制系统中得到了广泛的应用。但PID控制依赖被控对象的精确数学模型,由于摊铺机液压伺服系统多为非线性、时变复杂系统,参数变化大,PID参数确定困难。若单纯采用固参数的常规PID控制则不能满足在不同偏差下系统对PTD参数自整定的要求,控制器对运行工况的适应性差,从而影响其控制效果。模糊控制不依赖于被控制对象精确的数学模型,动态性能好、受系统参数变化的影响小,但稳态精度不高。采用模糊PID控制器并引入左右履带里程差关联的方法,既有模糊控制灵活、适应性强的优点,又有PID控制精度高的特点,同时引入左右履带的里程差方法,提高了摊铺机的行走控制效果。
1 摊铺机行走控制系统
沥青混凝土摊铺机普遍采用双泵-双马达系统,液压系统左右两侧为独立的行驶驱动液压回路。通过对左右两侧独立的泵和液压马达进行控制,实现摊铺机的前进/后退、左右转向及原地转向等动作控制,实现无级变速,达到恒速控制的目的。图1所示为摊铺机行走系统的控制框图。控制器的核心是控制变量泵比例电磁阀Y1、Y2、Y3、Y4,通过脉宽调制(PWM)调节比例电磁阀的电流控制泵的排量实现控制左右履带的行驶速度。通过比例电磁阀不同的组合方式,可以实现摊铺机的前进、后退及转向动作。通过马达换向阀控制Y5、Y6进行马达高低速转换,实现摊铺机行走/摊铺两种工作模式。
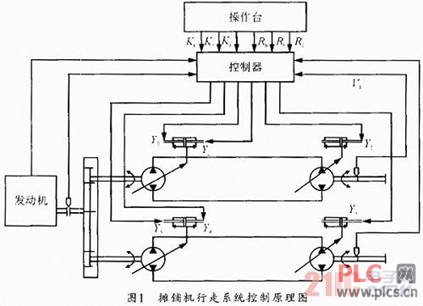
图1中Rs、Rh、Rt分别为最大行驶速度电位器、驱动手柄电位器和转向电位器。Kt为原地转向按钮,Ks为紧急制动按钮,Kp为行走/摊铺二位开关,在“摊铺”位时,为了实现恒速和直线控制,利用速度传感器V1和V2将行驶速度反馈至输入端,行驶控制采用闭环模式。
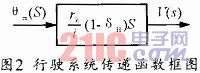
摊铺机行驶系统传递函数方框图如图2。

2 控制器设计
从上面分析知道,摊铺机行走系统的控制都归结到对变量泵比例电磁阀控制。本文采用脉宽调制的方式,PWM频率定为100Hz,为了在纠偏的同时提高恒速控制的性能,本文采用模糊PID控制。
2.1 常规PID控制
PID控制算法是利用偏差信号,采用比例、积分、微分三个基本环节对系统进行调节。为了在单片机上实现PID控制算法。PID控制规律的实现必须用数值逼近的方法,使模拟PID离散化变为差分方程。
常规PID控制的差分方程:
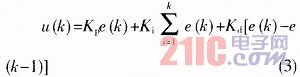
式中:u(k)为第k个采样时刻控制器的输出:e (k)为第k个采样时刻的偏差值,Kp、Ki、Kd分别为为比例增益、积分系数和微分系数。
其增量式控制算法为:

本文采用增量式PID控制算法以提高控制性能。在进行软件编程前,必须对Kp、Ki、Kd进行初始化,因此应对PID参数进行预整定。PID参数的整定比较成熟的方法有临界灵敏度法、扩充响应曲线法、Z-N法等等。本文利用Z-N法确定了一组PID参数Kp、Ki、Kd分别为0.4、0.0 3、0.2。实际应用中可结合具体情况反复整定并进行实验,确定一组较满意的控制参数。
2.2 自适应模糊PID控制
2.2.1 模糊PID控制器的结构
自适应模糊PID控制器是以误差e和误差变化率ec作为输入,可以满足不同时刻误差e和误差变化率ec对PID参数整定的要求。利用模糊控制规则对PID参数进行整定,便构成了自适应模糊PID控制器。自适应模糊PID控制器的原理图见图3。
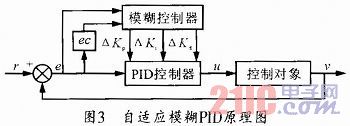
PID参数模糊自整定是找出PID三个参数与误差e(k)和误差变化率ec(k)之间的模糊关系,在运行中通过不断检测,根据模糊控制原理来对3个参数进行在线修改,以满足不同e(k)和ec(k)对控制参数的不同要求,从而使被控对象有良好的动态、静态性能。PID参数的整定必须考虑到在不同时刻三个参数的作用及相互之间的关系。
2.2.2 模糊控制规则设计
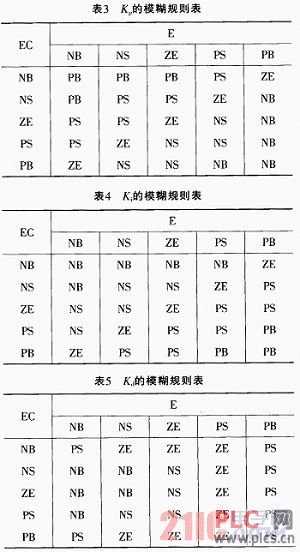
选择E与EC作为摊铺机行驶速度偏差e及速度偏差变化率ec的输入语青变量,输出语言变量选择KP、KI、KD,也就是参数Kp、Ki、Kd相应的语言变量。利用{负大、负小、零、正小、正大}={NB、NS、ZE、PS、PB}五个模糊状态描述语言变量E、EC、KP、KI、KD。
我国沥青混凝土摊铺机作业摊铺速度一般情况下≤6m/min,此处确定速度偏差e的基本域为[-0.6,0.6],利用扩充响应曲线法求出的PID整定参数可以确定Kp、Ki、Kd的大致变化范围,Kp变化范围为[0.2,0.8],Ki变化范围为[0.01,0.07],Kd变化范围为[0.2,0.6](根据控制周期的不同,PID控制参数的取值范围就会不同)。语言变量的隶属度赋值表如表1,2。

模糊自整定PID是在PID算法的基础上,通过计算当前系统误差e和误差变化率ec,利用模糊规则进行模糊推理,查询模糊矩阵表进行参数调整。
模糊控制设计的核心是总结工程设计人员的技术知识和实际操作经验,并根据参数自整定规律,建立合适的模糊推理规则表,得到针对Kp、Ki、Kd三个参数分别整定的模糊控制表如表3-5。
根据上述模糊控制规则,应用模糊推理的合成规则离线计算出模糊控制器的输出,也就是PID参数Kp、Ki和Kd的校正量△Kp、△Ki和△Kd,得到△Kp、△Ki和△Kd的查询表。实时控制时,首先根据e和ec的量化值直接从离线获得的查询表中查出校正量△Kp、△Ki和△Kd的量化值,再通过解模糊处理,得到△Kp、△Ki和△Kd的精确值,最后把它们和PID参数的基值Kp0、Ki0和Kd0按式(5)分别相加www.plcs.cn,得到在该状态下对电磁阀实施控制所对应的最优参数Kp、Ki和Kd,然后按PID控制算法继续进行运算及控制。
Kp=Kp0+△Kp
Ki=Ki0+△Ki (5)
Kd=Kd0+△Kd
在运行过程中,控制系统通过对模糊逻辑规则的结果处理、查表和运算,完成对PID参数的自校正。
3 左右履带里程差控制策略
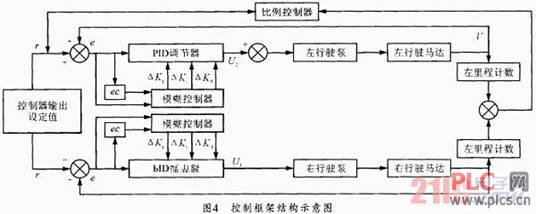
本文采用模糊PID控制,同时引入左有履带里程差纠偏环。将左马达的速度作为反馈值与左马达的设定速度值进行比较,同时将右马达的速度值作为反馈值与有马达的设定速度值进行比较,分别通过模糊PID调节器独立控制左右马达的转速,使其与设定值相同,这是控制的核心部分。再将左、右履带行驶里程的差值作为反馈值并以追踪零为目标通过比例调节器形成控制量,对其中一个马达的速度设定做调整,形成纠偏环,这是控制的辅助部分。控制框架结构示意图如图4。
4 现场测试
4.1 现场测试
将此纠偏控制算法应用于新筑公司MT12000型摊铺机的行走系统控制中,将发动机转速设定为2200r/min进行控制效果测试。

测试方法:每项测试距离为履带长度的2-5倍(即17米-42.5米),发动机工作在额定转速,在摊铺机两侧的机架及相邻履带设定试验的起始基准,启动发动机,转向控制器置于零位,使摊铺机按某一作业速度向前直线行驶,到达终点后停机,分别测量左右距离差的绝对值,来计算相对的跑偏量。
摊铺机试验过程轨迹图如图6:

采用纠偏算法在不同的速度设定值下得到的结果如表6:
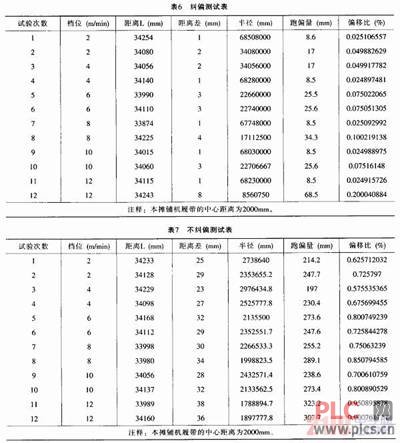
不采用纠偏算法在不同的速度设定值下得到的结果如表7。
从以上表6、表7的对比测试结果可以看出,利用此纠偏控制算法使MT12000型摊铺机的直线度跑偏量控制在0.4%以内,大大提高了摊铺机的行驶直线度性能,改善了摊铺机的整体控制效果。
5 结束语
沥青混凝土摊铺机行驶系统的直线度性能的提升是改善路面施工质量的重要途径之一,单纯依靠模糊PID控制可以提高机器的行驶恒速性能,但难以保证左右履带行程的一致性,从而无法确保机器的行驶直线度。本文探讨了在模糊PID控制的基础上加上左右里程关联的方法,并将其应用在摊铺机的行驶系统控制中,用以提高摊铺机的直线行驶效果。对比测试结果表明,用此纠偏控制算法获取的直线行走效果在原有控制效果的基础上提高了0.5%左右,在很大程度上提升了摊铺机的直线行驶性能。
|